

Artificial intelligence and soft computing viva questions
1) Discuss Artificial Intelligence.
Artificial intelligence (AI) refers to the simulation of human intelligence in machines that are programmed to think like humans and mimic their actions.
The term may also be applied to any machine that exhibits traits associated with a human mind such as learning and problem-solving.
2) Explain Agents and Environments
An agent is anything that can perceive its environment through sensors and acts upon that environment through effectors.
A human agent has sensory organs such as eyes, ears, nose, tongue and skin parallel to the sensors, and other organs such as hands, legs, mouth, for effectors.
3) What is Rationality?
Within artificial intelligence, a rational agent is typically one that maximizes its expected utility, given its current knowledge.
The utility is the usefulness of the consequences of its actions.
The rationality of human thought is a key problem in the psychology of reasoning.
4) Explain about Nature of Environment
An environment in artificial intelligence is the surrounding of the agent. The agent takes input from the environment through sensors and delivers the output to the environment through actuators.
There are several types of environments:
Fully Observable vs Partially Observable.
Deterministic vs Stochastic.
5) Explain about Types of Agent
General agent
Special Agent
Subagent
Agency coupled with an interest
Servant (or employee)
6) Distinguish between soft computing and hard computing
7) Discuss Various types of soft computing techniques
These techniques are able to operate both numerical and experimental data for simulation and modelling of MMC’s manufacturing processes
Genetic Algo
Response Surface Methodology
Artificial Neural Network
Taguchi Method
Fuzzy Logic optimization
Particle swarm optimization
8) Explain about Problem Solving Agent
Performs precisely by defining problems and several solutions
It’s goal based agents that focus on goals is one embodiment of a group of algorithms
Techniques used to solve well defined problems in the area of AI
Goal Formulation :
This one is the first & simple step in problem solving
It organizes finite steps to formulate a target or goals which requires some action to achieve the goal
9) Explain Formulating Problems
Problem formulation is step to identify the user attributes and needs
In this, Performance criteria of the desired solvent will be defined
Performance criteria and target properties for designed solvents
10) Depth Limited Search
Depth limited search is better than DFS and requires less time and memory space
DFS assures that the solution will be found if it exists infinite time
There are applications of DLS in graph theory particularly similar to DFS
11) Give some real-world applications of AI
Google Search Engine
Ridesharing Applications
Spam Filters in Email
Social Networking
Product recommendations
12) What is an artificial intelligence Neural Networks?
Artificial intelligence Neural Networks can model mathematically the way the biological brain works, allowing the machine to think and learn the same way the humans do- making them capable of recognizing things like speech, objects and animals like we do.
Height in fuzzy set
Highest membership value of fuzzy set is known as height of fuzzy set
The height of a fuzzy set A in X, is equal to the largest membership degree μm

Disadvantages of hill climbing
Hill climbing disadvantage is not being able to avoid plateau ridges local maxima
Local & Global Maxima - In this algo stops before getting best case
Plateau / shoulder - After Reaching peak, everywhere getting same successor value
Ridge - All are at same peak level but Algo stops on racing 1st peak, It will not explore rest
Types of planning
problem that feeds decision making by intelligent systems accomplishing the given target.
Total Order Planning
Partial Order Planning
Hierarchical Planning
Multi-Agent Planning
Conditional Planning
Expert system & what is the need
Expert system is a computer program that represents and reasons with knowledge of some specialist subject with a view to solve problems or give advice
Characteristics of expert systems:
Highly responsive
Reliable
Understandable
High performance
Fuzzy Inference System (FIS) or Fuzzy Knowledge based controller
FIS will take fuzzy set & rule based and analyze fuzzy set
It uses the “IF…THEN” rules along with connectors “OR” or “AND” for drawing essential decision rules.
Models - Mamdani & Sugeno
Who invented AI => John McCarthy
Defuzzification [ Conversion of fuzzy set into crisp set ]
Defuzzification refers to the way a crisp value is extracted from a fuzzy set as a representative value.
There are different defuzzification methods depending upon continuous or discrete value, convex or nonconvex value, symmetric or non-symmetric wave from the various methods are:
Centroid Method
Weighted Average Method
Center of Sums
Mean of Max
Max Membership Principle
Center of Largest
First/Last of Maxima
Stack is used by bfs/dfs? => DFS
BFS(Breadth First Search) uses Queue
CNF full form => Conjunctive normal form
Types activation function
Relu, bipolar, unipolar, continuous bi/uni polar, etc
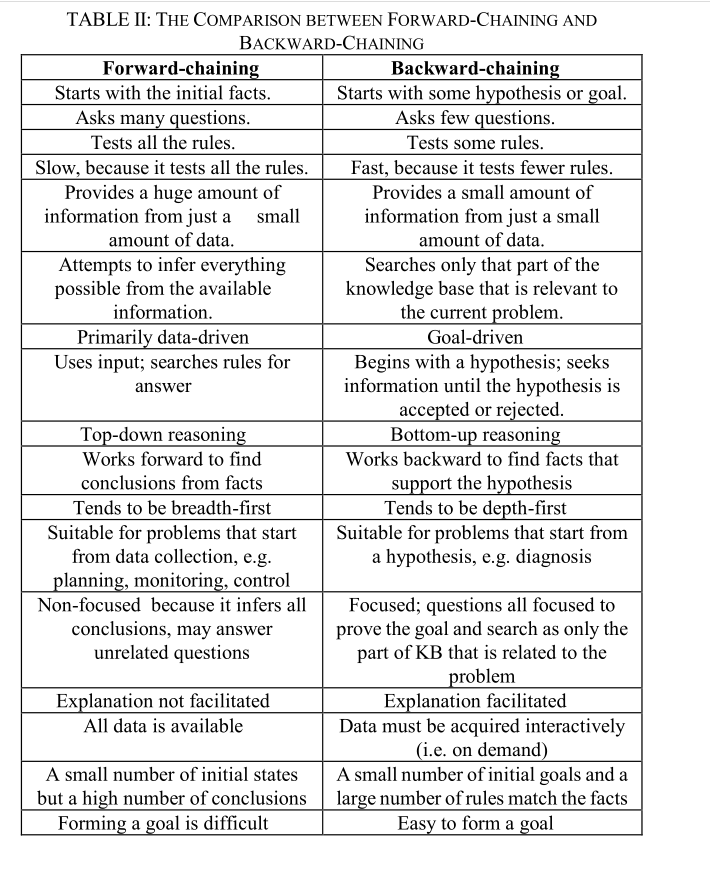
Forward Chaining
Forward chaining is also known as Forward Reasoning.
It is one of the two main methods of reasoning.
It can be described logically as repeated application of modus ponens.
Forward-chaining is a data-driven approach.
For any type of inference there should be a path from start to goal. When based on the available data a decision is taken, then the process is called forward chaining.
Support Formula of delta learning

C - constant
D - desired output
O - actual output
Fnet - activation Func
X - input
Problem solving steps
Problem statement
Describing initial state and goal state
State description
Action
Solution tree
Boundary => Whose membership value is between 0 and 1
Difference between total order and partial order
Hill climbing
As the name suggests, we have to reach the peak
Value is increasing from down to top
Once reached to peak, algorithm will stop and value will be same or decreasing
Simple Hill Climbing
It will not focus on all successors
If from the current node is better than first successor then chose first successor
Steepest
It will explore all successors
It will select the best successor for further exploration
Stochastic Hill climbing
Basic hill climbing always chooses the steepest uphill move
Stochastic hill climbing chooses at random from among the uphill moves
Types of Agents
Simple reflex Agent - Takes decision based on current situation
Model based reflex Agent - Takes decision not only based on current perceptron
Goal based Agent - Concept of goal achievement
Utility Agent - Similar to goal based
Why does the infinite loop condition arise in DFS ? [ Due to large height of graph]
A branch that does not end means always has more sons, and also does not get you to your target node
Fuzzy Membership Functions
Triangular - Defined by its lower limit a, upper limit b & modal value m so that a < m < b. We called value b-m = m-a
Trapezoidal - Defined by its lower limit and upper limit d, and lower & upper limits of its nucleus, b & c respectively
Gaussian - This is typical gauss bell defined by its mid value m and value sigma - 0, The smaller the sigma narrower the bell
Activation Functions
Binary bipolar
Binary unipolar
Continuous bipolar
Continuous unipolar
PEAS => Performance - Environment - Actuator - Sensor
Performance Measure - It specifies the performance expected by the agent.
Environment - It specifies the surrounding condition where the agent has to perform a task.
Actuators - It specifies the tool available for the agent to complete the task.
Sensors - It specifies the tool required to sense the work environment.
Alpha level set and strong alpha level set
Alpha-level set (Alpha-cut): Contains set of all elements whose µA(x) >= alpha (where alpha is some value)
Strong alpha-level set: Contains set of all elements whose µA(x) > alpha (where alpha is some value)
Universal and existential quantifier difference
Universal = All
Existential = Some
How to eliminate and in resolution
Eliminate ^ a ^ b = a
= b
Types of environment
Partially Observable, Deterministic, Sequential, Dynamic, Discrete and Multiagent.
What is actuator
It specifies the tool available for the agent to complete the task.


